Listing de visibilité
| Commande | PistLiVisibiliteListing |
| Description | Permet de calculer la visibilité en différents points du projet |
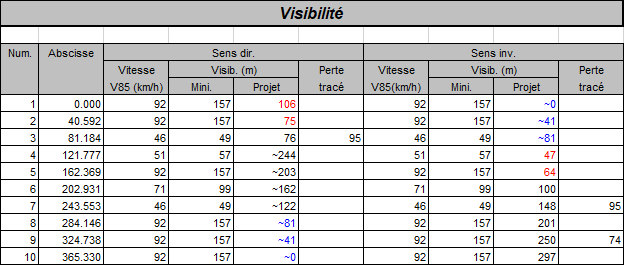
 Les résultats du calcul sont affichés dans un tableau résumant les visibilités en différents points du projet. Le calcul est effectué dans le sens aller et dans le sens retour.
Les résultats du calcul sont affichés dans un tableau résumant les visibilités en différents points du projet. Le calcul est effectué dans le sens aller et dans le sens retour.
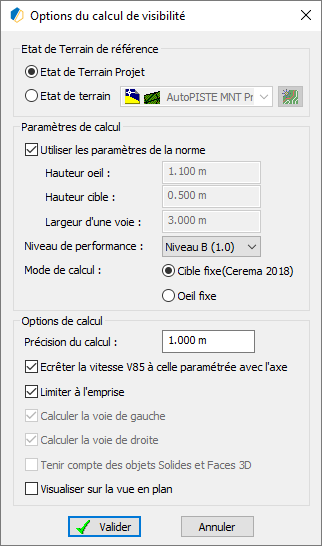
Le calcul de la visibilité est fait à l’aide de l’Etat de Terrain projet calculé. Il ne s’agit donc pas d’une visibilité théorique mais d’une visibilité réelle. Pour ce faire, AutoPISTE demande au lancement de la fonction de sélectionner l’Etat de Terrain de référence qui doit servir de référence pour le calcul. L’Etat de Terrain proposé par défaut correspond à celui paramétré lors du calcul du projet.
Il peut aussi s’agir de n’importe quel autre état de terrain.
Paramètres de calcul
- « Utiliser les paramètres de la norme » : Lorsque l’option est cochée, AutoPISTE utilise les paramètres de positionnement sur la chaussée paramétrés dans la norme. En décochant cette option, il est possible de personnaliser la position de l’obstacle et de l’automobiliste sur la chaussée.
- « Niveau de performance » Cette notion provient du guide « Conception des routes et autoroutes : Révision des règles sur la visibilité » d’octobre 2018 édité par le Cerema. 3 niveaux de performance sont prévus :
- Niveau A (1.1) : niveau plus exigeant que le niveau normal B. Les distances d’arrêt sont augmentées de 10%.
- Niveau B (1.0) : niveau normal.
- Niveau C (0.9) : niveau moins exigeant que le niveau normal B. Les distances d’arrêt sont réduites de 10%.
AutoPISTE propose un niveau de performance personnalisé ou l’utilisateur saisi lui-même le coefficient de performance (1.0 = niveau B).
- « Mode de calcul » : deux modes sont prévus :
- « Cible fixe » : il s’agit du mode décrit dans le document du Cerema. Pour chaque profil, le logiciel calcule la distance d’arrêt correspondante, positionne un obstacle sur la chaussée à cet endroit puis en avançant la voiture, le logiciel vérifie que l’obstacle reste visible par l’automobiliste.
- « Œil fixe » : il s’agit de l’ancien mode de calcul AutoPISTE. Pour chaque profil, le logiciel calcule la distance d’arrête correspondante, positionne l’obstacle sur la chaussée devant la voiture, puis éloigne l’obstacle en vérifiant qu’il reste visible par l’automobiliste.
Options de calcul
- « Précision du calcul » : Il s’agit du pas de déplacement de la cible le long de l’axe en plan. Plus le pas est petit, plus le temps de calcul est long.
- « Ecrêter la vitesse V85 à celle paramétrée avec l’axe » : La vitesse V85 peut être supérieure à la vitesse réglementaire. Cette option permet d’empêcher cela. Le paramétrage de la vitesse de circulation se fait dans le dialogue de paramétrage de l’axe en plan.
- « Limiter à l’emprise » : Si la ligne de visée entre le conducteur et l’obstacle sort de l’emprise de la route, alors on considère que la visibilité n’est plus respectée.
- « Calculer la voie de gauche » et/ou « Calculer la voie de droite » : ces options permettent dans le cas de chaussée à plusieurs voies de traiter la voie de gauche ou de droite. Ces options sont grisées si AutoPISTE ne détecte pas la présence de plusieurs voies.
- « Tenir compte des objets Solides et Faces 3D associés au projet » : cette option permet lors du calcul de visibilité de tenir compte des objets de type Solides et Faces 3D associés au projet.
- « Visualiser sur la vue en plan » : Voir ci-dessous.
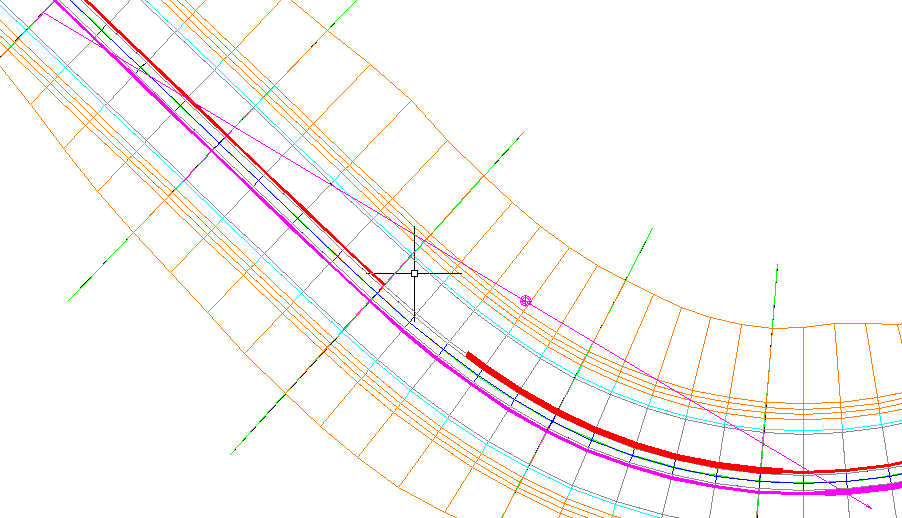
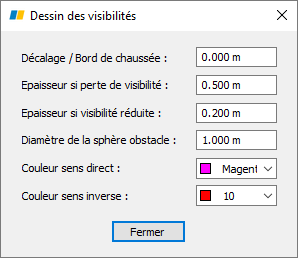 Visualisation sur la vue en plan de la visibilité
Visualisation sur la vue en plan de la visibilité
AutoPISTE peut schématiser sur la vue en plan la visibilité à l’aide de polylignes plus ou moins épaisses.
Vous pouvez paramétrer :
- Le décalage par rapport au bord de chaussée (coté TPC) des polylignes en m.
- Epaisseur de la polyligne dans les zones de perte visibilité effective.
- Epaisseur de la polyligne dans les zones ou la visibilité est en train de se perdre.
- Le diamètre de la sphère modélisant l’endroit causant la perte de visibilité.
- Les couleurs des polylignes pour le calcul dans le sens direct et le sens inverse.
Si une table de norme est appliquée au projet, AutoPISTE affiche dans ce listing la vitesse théorique calculée en appliquant les paramètres de cette dernière.
La vitesse théorique est calculée en utilisant dans la table de norme appliquée au projet :
- La vitesse selon le rayon de courbure de l’axe en plan,
- La vitesse selon la rampe à condition que la longueur de la rampe (distance entre l’abscisse du profil calculé et l’abscisse du début de la rampe) soit supérieure à la longueur minimale indiquée dans la table (par défaut de 250m).
La visibilité minimale théorique tient compte de la distance de freinage et de la distance parcourue pendant le temps de réaction (2 secondes). Distance arrêt = distance freinage + distance parcourue pendant le temps de réaction.
La distance d’arrêt est calculée selon les informations du Cerema page 11
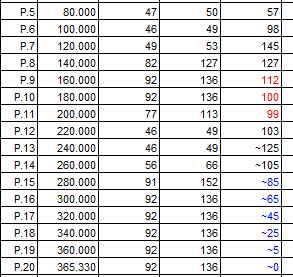
La colonne Visibilité projet :
- Elle est calculée en recherchant pour chaque profil actif de la zone de travail courante, jusqu’à quelle distance un objet de 0.35 cm de haut posé sur la chaussée peut être vu depuis ce profil sachant que l’on se positionne sur la chaussée à 2m du bord droit à une altitude de 1m (Ces 3 paramètres étant paramétrés avec la table de norme). Ce sont tous les objets Face3D des calques du MNT Projet sélectionné précédemment qui sont utilisés comme pouvant être un obstacle. La recherche de la visibilité de l’obstacle sur la chaussée se fait par défaut en avançant mètre par mètre (modifiable dans la boite de sélection du MNT Projet).
- Un "~" signifie qu’AutoPISTE affiche une visibilité minimale, la visibilité réelle n’ayant pas pu être calculée puisque la fin du projet a été atteinte avant d’avoir pu faire le calcul complet.
- Si la distance est affichée en rouge, c’est que la visibilité est inférieure à la visibilité minimale théorique.
- Si une ligne est affichée en bleu, c’est que la visibilité est inférieure à la visibilité minimale théorique mais que la visibilité calculée n’est pas la visibilité réelle puisque la fin du projet a été atteinte avant d’avoir pu faire le calcul complet.
La colonne perte tracé affiche :
- Dans le mode « Cible fixe », le temps pendant lequel l’automobiliste ne voit plus l’obstacle. Pour le Cerema, cette durée doit être inférieure à 2 secondes et ne doit pas être dans les 2 premières secondes de déplacement du véhicule.
- Dans le mode « œil fixe », la distance durant laquelle la cible n’est plus visible. Cette distance est calculée depuis le point de perte de visibilité. Cette colonne n’est renseignée que si une perte de tracé est effectivement trouvée. Pour accélérer les calculs, la perte de tracé n’est jamais recherchée si la visibilité projet est supérieure à la visibilité minimale.
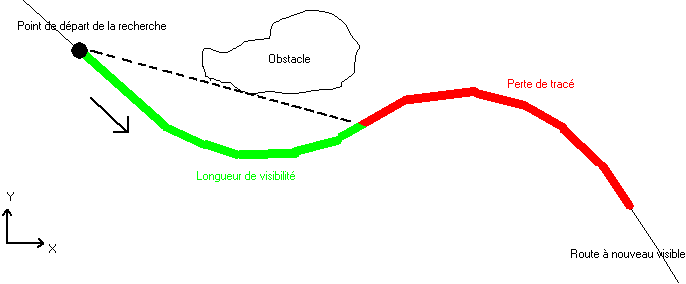
Principe de modélisation de la visibilité sur la vue en plan avec un exemple (Etude du sens direct) :
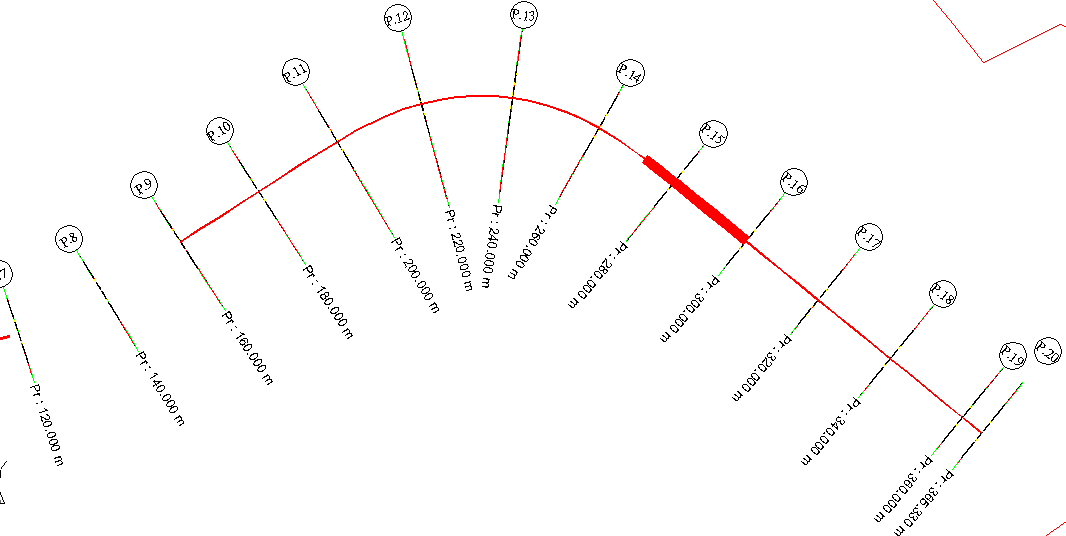
- Sur le profil P8 (Pr = 140m), il n’y a pas de problème de visibilité => pas de polyligne dessinée depuis le profil P8.
- Sur le profil P9 (Pr = 160m), il y a une visibilité de seulement 112m soit un problème de visibilité à l’abscisse (160 + 112 = 272m).
- De l’abcsisse 160 à 272, une polyligne d’épaisseur 0.2m est dessinée (visibilité réduite).
- À l’abscisse 272 commence une polyligne d’épaisseur 0.5m (perte de visibilité).
- Sur le profil P10 (Pr = 180m), il y a une visibilité de seulement 100m soit un problème de visibilité à l’abscisse (180 + 100 = 280m).
- De l’abscisse 180 à 280, une polyligne d’épaisseur 0.2m est dessinée identique à celle du profil P9.
- À l’abscisse 282 continue une polyligne d’épaisseur 0.5m commencée à Pr = 272m.
- Sur le profil P11 (Pr = 200m), il y a une visibilité de seulement 99m soit un problème de visibilité à l’abscisse (200 + 99 = 299m).
- De l’abscisse 200 à 299, une polyligne d’épaisseur 0.2m est dessinée identique à celle du profil P9.
- À l’abscisse 299 continue une polyligne d’épaisseur 0.5m commencée à Pr = 272m.
- Sur le profil P12 (Pr = 220m), il n’y a pas de problème de visibilité. Aucune polyligne matérialisant un problème de visibilité n’est créé par ce profil.
- Sur le profil P13 (Pr = 240m), il n’y a pas de problème de visibilité. Aucune polyligne matérialisant un problème de visibilité n’est créé par ce profil.
- Sur le profil P14 (Pr = 260m), il n’y a pas de problème de visibilité. Aucune polyligne matérialisant un problème de visibilité n’est créé par ce profil.
- Sur le profil P15 (Pr = 280m), il y a une visibilité de seulement 85m soit un problème de visibilité à l’abscisse (280 + 85 = 365m = fin du projet).
- De l’abscisse 280 à 365, une polyligne d’épaisseur 0.2m est dessinée.
- À l’abscisse 365 devrait commencer une polyligne d’épaisseur 0.5m. Mais comme il s’agit de la fin du projet, elle n’est pas dessinée.
- Sur le profil P16 (Pr = 300m), il y a une visibilité de seulement 65m soit un problème de visibilité à l’abscisse (300 + 65 = 365m = fin du projet).
- De l’abscisse 300 à 365, une polyligne d’épaisseur 0.2m est dessinée.
- À l’abscisse 365 devrait commencer une polyligne d’épaisseur 0.5m. Mais comme il s’agit de la fin du projet, elle n’est pas dessinée.
- Sur le profil P17 (Pr = 320m), il y a une visibilité de seulement 45m soit un problème de visibilité à l’abscisse (320 + 45 = 365m = fin du projet).
- De l’abscisse 320 à 365, une polyligne d’épaisseur 0.2m est dessinée.
- À l’abscisse 365 devrait commencer une polyligne d’épaisseur 0.5m. Mais comme il s’agit de la fin du projet, elle n’est pas dessinée.
- Sur le profil P18 (Pr = 340m), il y a une visibilité de seulement 25m soit un problème de visibilité à l’abscisse (340 + 25 = 365m = fin du projet).
- De l’abscisse 340 à 365, une polyligne d’épaisseur 0.2m est dessinée.
- À l’abscisse 365 devrait commencer une polyligne d’épaisseur 0.5m. Mais comme il s’agit de la fin du projet, elle n’est pas dessinée.
- Sur le profil P19 (Pr = 360m), il y a une visibilité de seulement 5m soit un problème de visibilité à l’abscisse (360 + 5 = 365m = fin du projet).
- De l’abscisse 360 à 365, une polyligne d’épaisseur 0.2m est dessinée.
- À l’abscisse 365 devrait commencer une polyligne d’épaisseur 0.5m. Mais comme il s’agit de la fin du projet, elle n’est pas dessinée.
Il en résulte que :
- Aucune polyligne n’est dessinée de l’abscisse 140 à 160m.
- Une polyligne d’épaisseur 0.2m matérialisant une zone de visibilité réduite est dessinée de l’abscisse 160 à 272m.
- Une polyligne d’épaisseur 0.5m matérialisant une zone de perte de visibilité est dessinée de l’abscisse 272 à 299m.
- Une polyligne d’épaisseur 0.2m matérialisant une zone de visibilité réduite est dessinée de l’abscisse 99 à 365m.
Sphère indiquant l’obstacle causant la perte de visibilité :
Si le diamètre de la sphère n’est pas nul et si la visibilité minimale d’après la table n’est pas respectée, AutoPISTE dessine sur la vue en plan la droite de visibilité (Véhicule -> Cible) et une sphère matérialisant l'endroit où un obstacle a provoqué la perte de visibilité.
REMARQUES :
- En mode « Cible fixe », le calcul vérifie que la visibilité est respectée pendant toute la longueur correspondant à la distance de freinage. Le calcul s’interrompt dès qu’elle n’est plus conforme aux recommandations du Cerema.
- En mode « Oeil fixe », le calcul de visibilité se poursuit aussi longtemps qu’aucun problème n’est rencontré. La durée du calcul peut donc être plus longue qu’avec le mode précédent.
- Le mode « Cible fixe » correspondant au mode décrit dans le dernier document du Cerema de 2018, c’est lui qui devrait être utilisé.